L’ evento a livello europeo che mobiliterà i “robottari” italiani, europei e perfino mondiali si sta avvicinando (31 maggio – 4 giugno). Ma analizziamo la storia di questa importante competizione scoprendo la storia e le caratteristiche di questo evento.
Eurobot è una competizione di robotica a livello mondiale, in cui robot totalmente autonomi gareggiano l’ uno contro l’ altro in mach che porteranno ad un unico vincitore. Queste sfide sono basate su regole ben definite, queste variano di anno in anno permettendo ad ogni team iscritto di realizzare ogni anno un robot con caratteristiche ben differenti l’uno dall’altro.
Questa peculiarità, a differenza di altre competizioni simili, permette anche ad un nuovo team di partecipare con le stesse possibilità di vittoria rispetto a team che gareggiano da più anni in questa competizione.
Le squadre, dovranno confrontarsi in differenti opzioni per poter superare le insidie dei robot avversari e del campo di gioco.
Per realizzare questo robot i tecnici del team attraverso una grande varietà di discipline (dalla meccanica all’elettronica).
Citando l’introduzione posta all’inizio dei regolamenti dell’eurobot riconosciamo gli importanti obbiettivi posti da questo importante evento:
l’obiettivo di Eurobot è quello di formare squadre in grado di sviluppare strumenti classificatori e sistemi embedded per i loro robots. Tutto ciò è incoraggiato sia dal fatto che i robot devono trovare il loro percorso in un campo colorato in maniera uniforme ed anche dal fatto che la dimensione massima del robot è più piccola di quella della scorsa edizione e inoltre i robots devono saper distinguere tra due diversi tipi di palle e manipolarle in differenti modi. Aver successo in tale competizione tecnologica può permettere ai partecipanti di essere in grado di costruire i robots del domani.
Queste tematiche possono essere usate in diversi tipi di ricerche tematiche nel futuro professionale dei partecipanti:
- Rilevazione di mine contro le persone (es. rilevare e far brillare una mina).
- Robot che evitano ostacoli e persone.
- Robot di soccorso (per salvare persone in scenari pericolosi).
- Robots in grado di raccogliere frutta.
Più che un campionato ingegneristico per giovani, Eurobot è un’amichevole opportunità per mettere in luce nuove soluzioni tecnologiche ed occasione per scambiarsi idee, conoscenze, suggerimenti e soluzioni attorno ad una competizione comune. La creatività è messa in gioco e l’interdisciplinarietà è necessaria. L’arricchimento tecnico/culturale è solo ultimo tra gli obiettivi.
Questa competizione parte nel lontano 1994 e giunge alla sua 12 edizione, ma diamo uno sguardo a tutte le varie competizioni che si sono svolte durante questi anni.
Dal 1994 al 1997 le competizioni si svolgevano come competizioni nazionali Francesi, ma queste ancora non comprendevano team stranieri.
Storia di Eurobot

Nel 1994 Si svolse la gara di sumo, (3kg)

Nel 1995 Si svolse la gara “balloon Attack”.I robot dovevano distruggere il pallone dell’avversario cercando contemporaneamente di difendere il proprio pallone.

Nel 1996 Si svolse “The gold rush” una gara alla conquista della maggior quantità di pepite all’interno di un campo esagonale.

Nel 1997 Si svolse il Basket, anche questo a livello robotico, i robot dovevano nel minor tempo possibile fare canestro nel campo avversario.
Dal 1998 fino ad oggi l’eurobot iniziò a diventare uno “sport” a livello europeo fino (dall’edizione 2004) una valenza mondiale.
Quella che si svolse nel 1998 fu una football game. Una partita di calcio costituita da una coppia di 2 robot per squadra che nel minor tempo possibile devono riuscire a fare goal nella porta avversaria utilizzando tutte le palline da tennis presenti. Parteciparono 9 squadre da 5 paesi.
Nel 1999 Una nuova competizione viene inventata dallo staff dell’eurobot Questa volta è l’attacco al castello “Castell Attack” Il campo è diviso in due da un fosso con 2 ponti. Su ciascun lato, c’è un castello fatto di cilindri di legno. Ogni squadra deve far cadere il castello avversario per contatto o usando le palline sul campo. Il robot inizia la partita dietro il proprio castello. Parteciparono 8 squadre da 5 paesi.
Il 2000 è l’anno del Fun Fair dove su di un campo collinare diviso in due parti, sono situati 10 palloncini: 5 blu e 5 gialli. Ogni squadra deve far scoppiare i palloncini nella parte opposta del proprio campo. L’uso di proiettili è vietato e le dimensioni del robot non possono permettergli di far scoppiare i palloncini a distanza. Parteciparono 12 squadre da 7 paesi.
Il 2001 l’anno dello “Space odyssey” Lo scopo del gioco è quello di conquistare dei pianeti posizionandovi delle bandierine. Vi è un solo limite: alla fine del match ogni singola squadra può avere sul campo soltanto 10 elementi tra robot e bandierine.

Il 2002 “Flying Billiards”: Su di un campo da gioco piatto, 8 palle rosse e 4 palle nere sono posizionate a caso, rispettando però una simmetria centrale. Ogni robot parte da un lato del campo e deve mettere le palle nere nei canestri della propria metà campo e quelle rosse nella metà campo avversaria. Dopo 1min30s, viene calcolato il punteggio!

Il 2003 “Heads or Tails”: Posizionare dei dischetti sul piano di gioco in posizione piana, in maniera tale che la faccia rivolta verso l’alto sia dello stesso colore assegnato alle squadre in gara. I colori possibili sono due:verde e rosso. I dischetti possono anche essere impilati, per un massimo di tre dischetti.
Il 2004 “Coconut Rugby”: Lo scopo del gioco è quello di abbattere il maggior numero di birilli del colore assegnato (rosso o verde). Per aumentare il proprio punteggio si possono inoltre rialzare i birilli abbattuti dal robot avversario.
Infine il 2005 con il Bowling: Abbattere il maggior numero di birilli del colore assegnato (rosso o verde). Per aumentare il proprio punteggio si possono inoltre rialzare i birilli abbattuti dal robot avversario.
Finalmente dopo questa rapidissima carrellata a tutte le varie edizioni dell’Eurobot giungiamo all’evento di quest’anno.
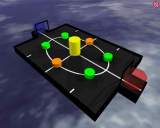
Funny Golf
Nella settimana a cavallo tra maggio e giugno, il Dipartimento di Ingegneria Elettrica Elettronica e dei Sistemi dell’Università degli Studi di Catania ospiterà i campionati dell EUROBOT 2006. Gli organizzatori prevedranno in tale occasione la partecipazione di almeno 60 squadre provenienti da tutto il mondo (Europa, paesi del mediterraneo, America, Asia).
Rispetto agli anni precedenti i robot costruiti, uno per squadra, dovranno mettere in buca più palline di colore bianco nella buca del colore della propria squadra, precedentemente scelto (rosso o blu). Inoltre il robot potrà anche ostacolare l’avversario portando le palline nere nella buca dell’avversario rendendo più difficile la partita, dando più spettacolo alla gara.
Alcune palline sono messe nel campo di gioco, ma i robots possono anche attivare un meccanismo di espulsione di altre palline (bianche o nere). Questi meccanismi sono attivati da un contatto elettrico posto sul campo attraverso dei “Totem”. Tutto questo in soltanto 90 secondi.
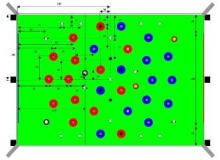
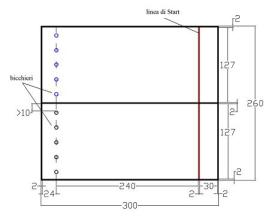
Gli elementi del campo da gioco sono:
- Un campo rettangolare colorato verde con 2 linee nere che dividono il tavolo in 3 parti.
- 28 buche. Le buche sono cerchiate da un bordo blu o rosso.
- 31 palle bianche: 15 palle bianche sono disposte nel campo da gioco, 4 palle bianche sono disposte nei meccanismi di espulsione. 11 delle 15 palle bianche del campo da gioco sono disposte in posizioni fisse, invece 4 sono disposte in modo random.
- 10 palle nere: 6 nel campo da gioco (2 palle sono nella linea centrale. Le altre 4 palle sono disposte all’inizio della partita, in maniera random in 4 buche, 2 per lato) ed 1 rispettivamente in ogni meccanismo di espulsione.
- 4 totems sono posti in modo random all’inizio della gara, con una simmetria centrale (guarda il grafico per una possibile posizione dei totems).
- 4 meccanismi di espulsione di palle (con 4 palle bianche ed 1 nera in ogni meccanismo), una ad ogni angolo del campo. Ognuno di essi è attaccato nel totem opposto (con simmetria centrale).
- L’area di gioco è circondata da un bordo di legno. Esso è spesso 22mm ed alto 70mm rispetto al livello del tavolo.
- Questo è uniformemente colorato in bianco opaco, ad eccetto di fronte alla posizione di start che è colorata di blu e rosso (guarda nell’appendice). Il bordo è considerato fuori del campo di gioco. Esso infatti non deve essere considerato nelle misure del campo descritte in basso.
- Ogni squadra è rappresentata da un colore (blu o rosso). Il robot rappresentato dal colore blu inizia la partita tra le buche che hanno colore rosso ed il bordo blu e che si trovano vicino al bordo.
Il regolamento in Italiano lo potrete trovare nella sezione download del portale
Altri eventi
Durante l’Eurobot 2006 ci saranno vari eventi collegati, certi strettamente legati alla competizione europea come il NOC, altri come la competizione a Livello Europeo di Minisumo e la LegoMiniBOT.
Ma analizziamole tutte e 3 le competizioni collegate all’eurobot 2006:
NOC
Lo scopo della Eurobot National Organizing Committee (NOC) è quello di organizzare una gara di qualifica tra le squadre Italiane i cui vincitori si assicureranno l’acceso alla gara Europea.
Nella giornata del 1 giugno poco dopo gli altri eventi proverà e verificherà attraverso una qualificazione interna tutti i robot Italiani in modo tale da portare nelle gare mondiali dell’Eurobot soltanto 3 robot.
Il Lego MiniBOT

Nasce in seguito alla III edizione del Corso di Robotica organizzato dalla Residenza Universitaria Alcantara di Catania, in collaborazione con il DIEES, e in occasione di Eurobot 2006, all’interno della quale competizione si colloca.
LegoMiniBot è una competizione di robots aperta a tutte le squadre di giovani frequentanti le scuole medie superiori. Ogni squadra dovrà essere composta da diversi partecipanti.
Tale manifestazione mira a suscitare l’interesse del grande pubblico verso la robotica ed inoltre mira ad avvicinare i giovani alla Scienza e Tecnologia. Le gare saranno svolte con spirito di amicizia e sportività.
La partecipazione alla competizione comporta piena accettazione delle regole ed ogni interpretazione di esse sarà fatta dalla commissione di arbitraggio (durante l’anno) e dagli arbitri durante le gare.
Le decisioni degli arbitri sono definitive e non possono essere cambiate senza un accordo che è richiesto a entrambe le parti coinvolte.
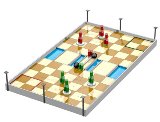
Regole di base
Per questa edizione i robots dovranno raccogliere dei bicchieri. Ogni squadra può progettare e costruire un solo robot. Una gara coinvolge due squadre e dura 180 secondi.
Ad ogni squadra verrà assegnato, al momento della competizione un colore, bianco o blu, ossia il colore dei bicchieri che devono essere prelevati e riportati al punto indietro dal robot.
Così i robot, dopo aver attraversato il campo, dovranno recuperare, senza danneggiarli, i cinque bicchieri (tutti dello stesso colore) che si trovano nella propria metà campo e riportarli alla linea di partenza
Per ulteriori informazioni fate un salto sul sito ufficiale: http://www.alcantarobotics.org/
Sempre durante la giornata del 1 Giugno ci sarà la prima competizione di Minisumo a Livello Europeo. Questo evento sarà gestito da tutto lo staff di Minisumo.net.
Per iscriversi alla categoria Minisumo basterà mandare una e-mail ad info@minisumo.netinfo@minisumo.net con le seguenti informazioni:
- Oggetto: EUROBOT 2006 Iscrizione Robofesta Minisumo
- Nome: Marco
- Cognome: Rossi
- Numero di Robot: 1
- Nome Robot: Rossi1
- Informazioni particolari: Robot di prova
Svolgimento evento
L’evento si svolgerà all’interno del centro congressi “La Perla Ionica”
Via Unni, 10 – Capomulini. 95024 Acireale (CT) – Italia.
LA PERLA IONICA, Centro Congressuale Alberghiero tra i più grandi del meridione d’Europa. Sulla costa Orientale della Sicilia, a soli 18 km dall’ Aeroporto Internazionale di Catania, adagiato sul mare e ai piedi dell’Etna, il più grande vulcano attivo d’Europa.

Sul sito della “PERLA IONICA”, http://www.laperlaionica.com/ITA/homepage.htm, troverete tutte le informazioni necessarie riguardanti il centro congressuale e le modalità per raggiungerlo.
E’ disponibile un file KMZ per la collocazione geografica dell’evento, questo è visionabile attraverso il programma.