Grazie alle sue numerose doti e peculiarità rendono il robot unico nel campo dei robot in Kit.
Ma andiamo ad analizzare le caratteristiche passo passo.
Una volta aperta la busta contenente il kit ci accorgiamo che il robot è diviso in più di una sezione, l’ordine che appare chiaro è dal montaggio di ogni scheda elettronica presente nel robot, in oltre vi è contenuta un comodo manuale per la costruzione in Inglese, con fotografie in bianco e nero.
Nel manuale vi è contenuta anche una comoda guida su come poter iniziare a saldare con tanto di illustrazione, un buon punto a favora della solarbotics per che è un novizio nel campo dell’elettronica.
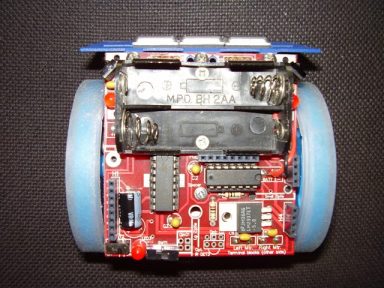
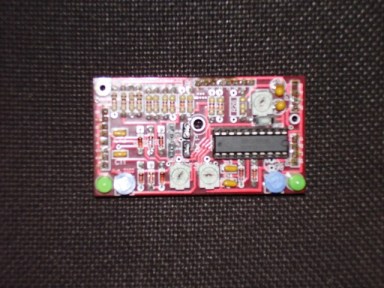
Ma analizziamo le tre schede contenute nel Kit, la prima che inizieremo a montare (seguendo la guida è la “Mainboard” questa scheda doppia faccia ha presente gli elementi più importanti per la gestione del robot e permette il collegamento delle altre schede attraverso i connettori presenti sulla scheda ed anche montaggio dei motori, delle batterie e della benna sulla superficie della scheda.
La Mainboard
Nel corredo della mainboard possiamo notare questi elementi fondamentali:
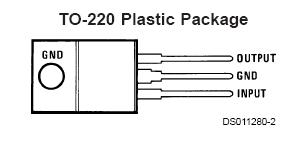
Regolatore di tensione LM2937, il noto regolatore “Low dropout” che permette di stabilizzare la tensione anche con pochi volt in ingresso in formato TO220.
Infatti possiamo leggere dal datasheet:
- Voltaggio minimo in ingresso: 6V
- Voltaggio massimo in ingresso: 26V
- Corrente massima in ingresso: 1A
- Voltaggio in uscita tipico: 5V
- Corrente in uscita: 500mA
Questo permette al robot di funzionare anche quando le batterie stanno quasi per esaurirsi e arriva poca tensione in ingresso.
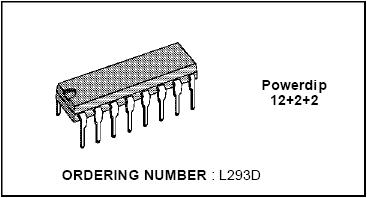
L’altro elemento di grande importanza è il ponte di controllo dei motori gestito dal L293D in formato PDIP.
Questo Ponte permette di gestire due motori contemporaneamente grazie a due canali separati. Ma anche qui analizziamo le caratteristiche di questo Ponte H:
- Capacità di uscita di corrente 600mA.
- Corrente di picco massima per canale: 1.2°
- Enable facilitato
- Protezione dalle temperature massime
- Logica a “0”, Voltaggio di ingresso sopra i 1,5V
- Diodi di ricircolo integrati
Grazie a questo si riesce a gestire perfettamente ogni motore del robot.
Ma proseguendo ad analizzare la prima scheda è importante sottolineare la presenza dei ricevitori 38Khz PNA4602. Prodotta dalla Panasonic, questo viene utilizzato per ricercare l’avversario.
Altri elementi presenti di minore importanza sono i 3 LED rossi disposti agli estremi dei tre lati della scheda, questi vengono utilizzati nei seguente modo.
Il primo disposto nella parte posteriore viene utilizzato come spia di accensione, gli altri due laterali come spia di rilevazione dei sensori frontali.
Ed infine è da evidenziare la presenza di due interruttori, uno generale e l’altro per la disabilitazione dei motori per poter tarare con comodità i sensori presenti sul robot. È presente anche se non disponibile nel Kit un piccolo spazio per un ricevitore PNA dietro la scheda in modo tale da riconoscere gli avversari posteriormente. Ma come si può notare non è presente l’emettitore, quindi il robot si può accorgere dell’avversario soltanto nel caso in cui l’avversario stesso utilizzi sensori infrarossi tarati a 38Khz.
Le altre schede

Nella seconda scheda che inizieremo a montare troveremo la scheda dei sensori di linea.
Questa scheda come la precendente è una scheda doppia faccia.
Su questa il robot potrà sia riconoscere la linea attraverso i 4 sensori QRD1114, che permettono una corretta visione del bordo linea. Potremo notare che la scheda è predisposta per 5 sensori ma che il 5 sensore di linea centrale non è compreso nel Kit, questo infatti è incluso soltato nelle espansioni del robot e viene gestito solamente dalle schede con microntrollore.
L’integrato LM555 permette di generare il segnale a 38Khz che verrà emesso dai LED4 e LED5 presenti sulla scheda che serviranno per la rilevazione dell’avversario grazie alla coppia dei ricevitori presenti sulla Mainboard.
LM555 però va correttamente tarato attraverso il trimmer posto alla estremità destra della scheda. Questo trimmer da 5K multigiro può essere regolato comodamente attraverso un cacciavite a testa piatta.
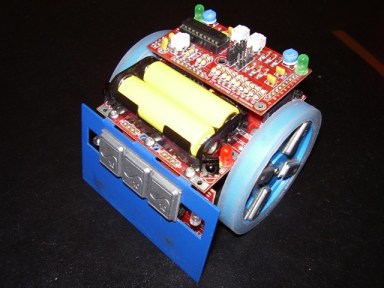
L’ultima scheda presente nel KIT è la “Discrete brainboard”. Già il nome spiega tutte le caratteristiche principale di questo robot. Infatti questo è il cervello BEAM del robot.
Questa attraverso feedback positivi e negativi permette di rispondere ai segnali provenienti dai sensori e di rispondere facendo compiere al robot delle azioni.
L’elemento peculiare che contraddistingue questa scheda è la presenza di tantissime resistenze e diodi.
Agli estremi posteriori della scheda sono presenti 2 LED verdi che fanno da spia ogni qual volta che il robot riconosce la linea bianca. Per poter regolare i sensori di linea sono presenti 2 trimmer, affianco ai LED verdi, di colore blu questi permetto la regolazione della sensibilità in modo tale da tarare perfettamente il robot per riconoscere al meglio la linea bianca.
Al centro sono presenti invece due trimmer grigi di differente formato rispetto ai precedenti, questi permettono la regolazione dei movimenti del robot.
Il primo posto alla sinistra permette di regolare il tempo di indietreggiamento ogni qual volta il robot riconosce la linea bianca; quello a destra invece regola la rotazione il tempo di rotazione del robot. Ogni qual volta che riconosce la linea bianca o trova l’avversario.
Isolato dagli altri è l’ultimo trimmer grigio, questo permette di regolare lo start del robot per i 5 secondi. Infatti subito affianco possiamo trovare un piccolo pulsante che permette di resettare il robot e portarlo in pausa.
Sono anche presenti dei Jumper che se il proletario vuole utilizzare permettono la selezione della modalità di funzionamento del robot.
Questa può essere di due tipi o come giocatore di Minisumo o come Line Follower.
Infatti il sumovore può anche gareggiare come robot che segue una linea nera. Altra nota positiva di questo piccolo robot.
Degno di nota anche lo studio dei realizzatori che hanno eliminato peculiarità presenti nelle precedenti versioni del robot.
L’ Anti Sumo-Dance (ferma due minisumo quando iniziano a girare spingendosi a vicenda) Anti edge-ram (impedisce la doppia lettura del bordo bianco)
La meccanica
Dopo aver analizzato tutta l’elettonica possiamo passare a vedere le caratteristiche della parte meccanica del robot.
Come abbiamo accennato precedentemente il robot viene assemblato direttamente sulla scheda madre questo può portare sia ad una maggiore compattezza del robot ma anche a più possibilità di rovinare le piste presenti sulla parte inferiore della Mainboard.
I motoriduttori utilizzati sono i classici Gear motor con asse dritto. Questi motori vantano delle seguenti caratteristiche:
- Motoriduttore DC con rapporto di riduzione 224:1
- Coppia di oltre 3Kg*cm
- Velocità di rotazione di 0.26s /60° (38 rpm – poco più lento di un servocomando)
- Il consumo è di circa 52mA a ruota libera e di 600mA in stallo ad una tensione di 5V
- L’asse presente sul motoriduttore è di 7mm di forma rettangolare.
- Le misure sono: 55 x 47 x 22 mm
Questi motori sono più che ottimi per il robot su cui andranno montati. Ma un piccolo particolare che vorrei evidenziare durante le prove è la mancata presenza all’interno del Kit condensatori ceramici da 1mF per filtrare i disturbi generati dal motore.
Infatti questa mancata presenza dei condensatori creava dei forti disturbi capaci perfino di disturbare il segnale televisivo facendo perdere il canale anche a diversi metri di distanza dalla televisione.
Ma come detto precedentemente si può riparare il problema aggiungendo dei condensatori di filtro su ogni motore.
Le ruote invece sono le classiche ABS dalle seguenti caratteristiche:
- Diametro: 63mm
- Spessore: 7mm
Queste vengono incluse con un corredo di 4 elastici per poter far aderire meglio la ruota al terreno.
Le espansioni



E’ importante sottolineare un grande corredo di espansioni che è possibile prendere a parte, esistono infatti varie versioni di Brain-Board che permettono di interfacciare il robot con vari tipi di microntrollore.
Esiste infatti la versione che permette l’interfacciamento con Basic Stamp II, o OOPic-C o BX24.
Un’altra versione permette di gestire il Sumovore con Microcontrollore Microchip 16F877(A)
E l’ultima versione che permette di gestire il robot con ATMEL Mega8L.

Per quanto riguarda la meccanica è da poco uscita una espansione che permette un miglioramento del montaggio dei motori ed una struttura più aggressiva del robot stesso.
“The Sumovore Baseplate Upgrade Kit” “Aggiornamento della piastra base del Sumovore” Questo permette il montaggio dei motori su di un asse metallico evitando di incollare il robot alla piastra base.
Molto utili sono le ruote in Poliuretano che permettono un migliore “ancoraggio” al ring, migliorando l’aderenza delle ruote al terreno. Queste hanno le seguenti caratteristiche, si adattano a alle ruote in ABS precedentemente descritte.
Con un peso di 7,5 grammi ciascuna e dallo spessore di 3mm.
Il robot
Una volta montato il Sumovore ci troviamo un robot con le seguenti caratteristiche:

- Peso solo Robot: 210g
- Con 6 batterie da 22,5g non in dotazione: 345g
- Base: 90mm
- Profondità: 90mm
- Altezza: 75mm
Parliamo finalmente dei test:
Per eseguire i test abbiamo aggiunto al nostro Sumore il Kit “The Sumovore Baseplate Upgrade Kit” portando il robot ad un assetto “aggressivo” dal peso di 85g ed aggiungendo 70g di piombini disposti nel seguente ordine:
- 20g per ogni ruota e 30 grammi sulla benna.
Infine riguardo l’aderenza, abbiamo aggiunto le ruote il Poliuretano da 7,5g ciascuno
Il Robot raggiunge il peso di circa 490g, perfetto per poter fare una competizione di minisumo.
Rielenchiamo nella seguente tabella le caratteristiche del robot:
| Componenti | Peso |
|---|---|
| Peso SOLO robot | 210g |
| 6 Batterie | 22,5g x 6 = 135g |
| Piombini | 70g |
| Espansione “The Sumovore Baseplate Upgrade Kit” | 60g |
| 2 Ruote in Poliuretano | 7,5g x 2 = 15g |
| TOTALE | 490g |
| Misure | |
|---|---|
| Base | 90mm |
| Profondità | 90mm |
| Altezza | 75mm |
Test e conclusione
Le batterie utilizzate nei nostri test sono ricaricabili NI-CD da 1,2V da 1000mA
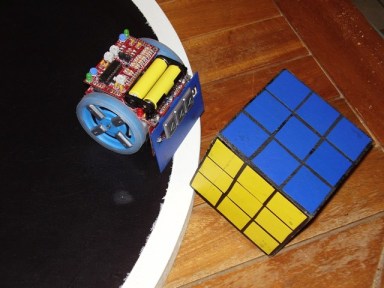
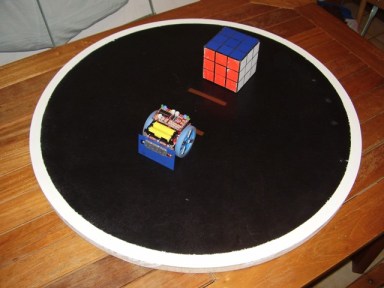
La prova che effettueremo sarà la “prova del CUBO”
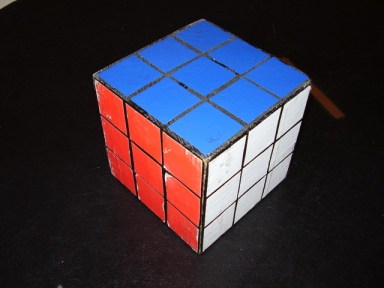
Il Cubo che adotteremo è un cubo dal peso di g, che richiama la forma del cubo di rubik Come possiamo vedere in foto, il suo peso è di 470g
Il robot come possiamo vedere dal video è molto veloce nei movimenti e in soli 12 secondi riesce scaraventare il cubo al di fuori del ring. Potete anche visionare il video del test a questo premendo qui, da 2,63MB in formato QuickTime Qui possiamo vedere infatti la tabella dei risultati:
| Prova | Tempo |
|---|---|
| 1 | 12sec |
| 2 | 12sec |
| 3 | 12sec |
Dove poter comprare il robot
Principalmente si può trovare sul sito ufficiale del robot, la Solarbotics, americana.
E dal rivenditore ufficiale Italiano: robot-italy
Buon divertimento, con questo robot, e preparatevi ad altre guide sulle varie espansioni del Sumovore.