Dopo la breve introduzione della settimana scorsa, questa volta andremo a realizzare un robot capace di muoversi nel campo dei solaroller.
Per poterlo realizzare avremo bisogno di pochissimi componenti:
Un pannello solare dalle dimensioni standard, come ci viene chiaramente espresso dal regolamento dalle dimensioni di: 24 x 33 cm

Dopodiché a seconda dello schema che seguiremo utilizzeremo componenti elettronici differenti.
Gli schemi più conosciuti sono di solito due, dove la differenza principale è il sensore che gestisce la carica del condensatore.
Il primo schema
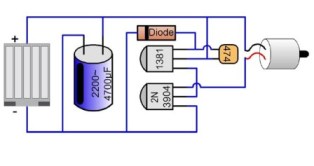
Il primo schema che andremo ad analizzare utilizza l’integrato 1381-C questo infatti controlla la tensione e cambia lo stato del pin di uscita quando viene raggiunta la soglia nominale.
La lettera indica la tensione di soglia, infatti questo integrato è disponibile in molti formati:
| Voltaggio | |
|---|---|
| C | 2.0 |
| D | 2.1 |
| E | 2.2 |
| F | 2.3 |
| G | 2.4 |
| H | 2.5 |
| J | 2.6 |
| K | 2.7 |
| L | 3.0 |
| M | 3.2 |
| N | 3.4 |
| P | 3.6 |
| Q | 3.8 |
| R | 4.0 |
| S | 4.2 |
| T | 4.4 |
| U | 4.6 |
Ma quelli di cui avremo bisogno saranno i modelli C o E.
Gli altri componenti sono facilmente reperibili e sono
- Un transistor 2N3904 o un 2N2222
- Un condensatore elettrolitico da minimo 4700uF
- Un Condensatore ceramico da 0.47uF
- Un Diodo 1N914
- Un motorino elettrico, possiamo utilizzare quello presente nei lettori CD dei computer per aprire il cassetto.
A Questo punto seguendo questo schema, riusciremo facilmente a realizzare il robot.
La tecnica migliore per la saldatura è il freeforming, vale a dire saldare i componenti senza usare basette o circuiti stampati.
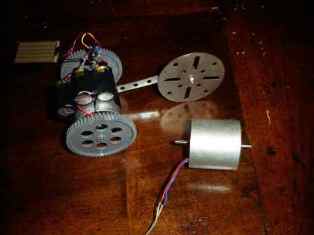
Il risultato che otterremo sarà questo.
Il robot realizzato è di Luciano Bernardi ed utilizza lo schema lo schema sopra citato per potersi caricare e compiere il percorso.
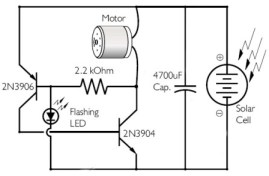
Secondo Schema
Il secondo schema che utilizzeremo utilizzerà due transistor molto conosciuti i:
- 2N3904
- 2N3906
- Avremo sempre bisogno di un condensatore da 4700uF,
- FLED ( un LED lampeggiante)
- una resistenza da 2.2Kohm
Il robot anche qui risulterà molto semplice e pronto dal primo istante, basterà metterlo in pista per poter saggiare già le prime vittorie.
La parte fondamentale di questo robot è sicuramente la realizzazione del telaio per poter compiere il percorso.